
The Korea Institute of Science and Technology (KAIST, President Lee Kwang -hyung) is a NSS of the 2025 IEEE International Robot and Automation Conference (ICRA) held by the Urban Robotics Lab on the Institute of Electrical and Electronic Engineering. It announced on the thirtieth that it was ranked No. 1 within the Nothing Stands Still Challenge 2025.
The NSS Challenge was co -sponsored by the worldwide construction company Hilli and the University of Stanford University Gradient Space Group, and the expansion of the Hilli SLAM (SIMULTANEOUS LOCALIZATION and Mapping) Challenge, which has been held since 2021, as a world robot and automation. It is taken into account one of the outstanding challenges within the ICRA.
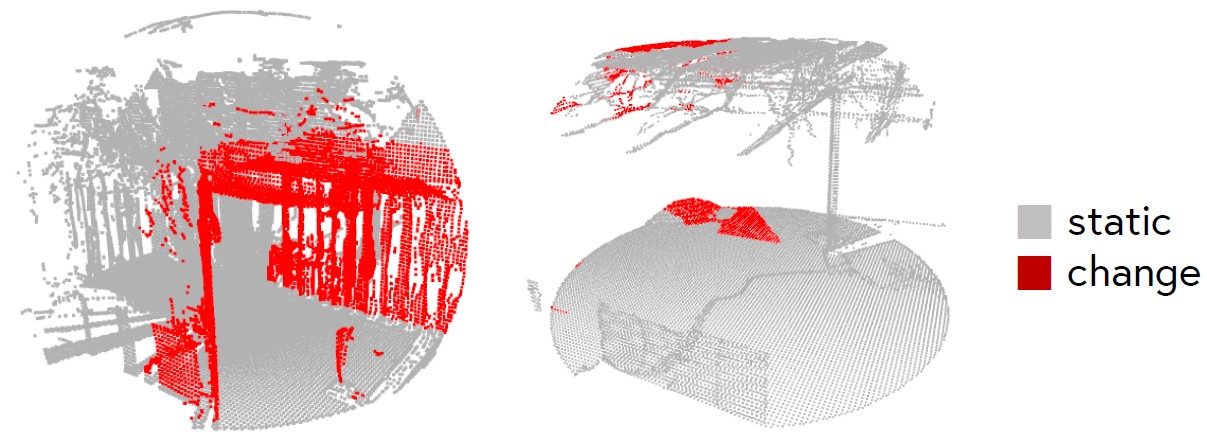
This challenge focuses on how accurate and strongly capable of consist of the lidar scan data collected in various times, resembling construction and industrial environments. It deals with multi-session slam technology that corresponds to structural changes that occur over a variety of time zones, not only a single point of accuracy.
The Urban Robotics Lab team ranked first in the general rating of the third Taiwan National University and the second -largest China North Korea University of Science and Technology, with the placement estimation and map preparation technology that solves the match between Lida data collected in multi -time and spaces. The winning team will probably be awarded $ 4000.
The Urban Robotics Lab team has developed its own multi-regination framework that may strongly match many scans without prior connection information. The framework consists of an algorithm that summarizes the features within the scan and finds the response point, an algorithm that performs global matching based on the corresponding point found, and an algorithm for purification of change detection. Through these technical unions, the constant performance is stably implemented based on a set structure in the commercial environment where the change is severe.
Lida scanning technology is a key element of SLAM in various autonomous systems, including autonomous vehicles, autonomous robots, autonomous walking systems, autonomous aircraft, and autonomous port.
“This award technology is taken into account to be a case of proving each academic value and industrial application at the identical time in that it maximizes the performance of precisely estimating the relative position between different scans despite the complex environment,” said Myeong -hyun, a professor of electrical and electronics engineering.
Meanwhile, Urban Robotics Lab Team won the primary SLAM challenge in 2022 and won second place in academia.
By Park Soo -bin, sbin08@aitimes.com